-

济南中研试验机有限公司
主营:弹性铁垫板静刚度试验机,风电螺栓拉力试验机,矿用三环链卧式拉力试验机

济南中研试验机有限公司
主营:弹性铁垫板静刚度试验机,风电螺栓拉力试验机,矿用三环链卧式拉力试验机 12
12
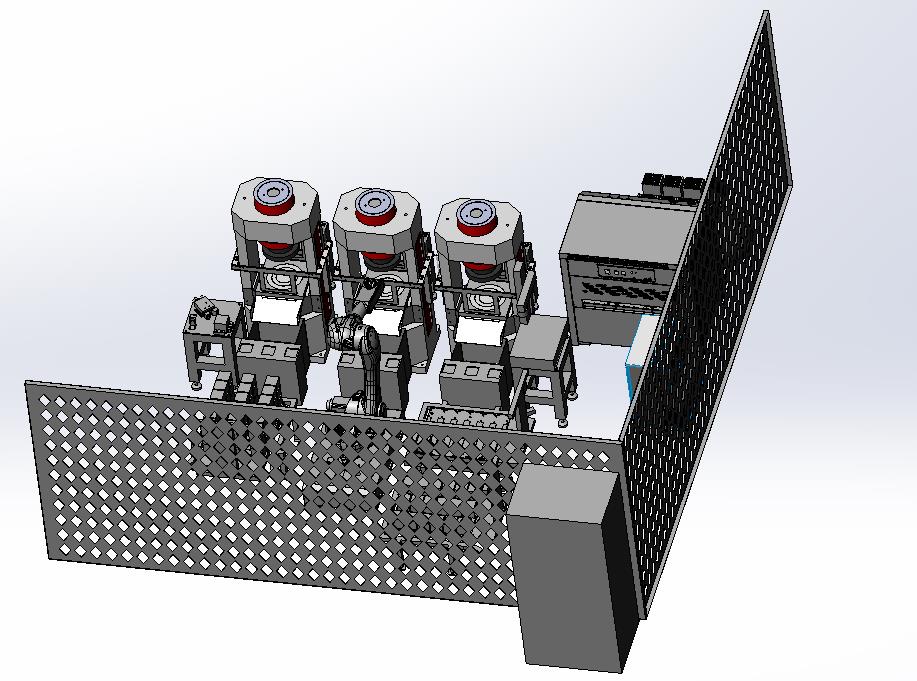
为提高建筑砼块检测速度,减少人工操作引起的错误,混凝土抗压强度智能检测系统专为解决以上问题设计。本系统由1台六关节机器人、1台智能检测系统电控柜、1套智能检测系统控制软件、3台伺服控制压力试验机系统、 3套压机台面清扫机构、3套残渣回收箱、1套定位扫码机构、1台激光刻印机、3台临时存样台、1个供料车、2个收料车组成、1台大功率静音气泵、3套试验防护罩、防护围栏、录像系统等组成。本方案3台压机呈直线布置。
伺服控制压力试验机系统3套
2、6关节机器人、夹具、底座各1个
3、智能检测系统电控柜1套
4、智能检测系统控制软件1套
5、压机台面清扫机构3套
6、残渣回收箱3套
7、定位扫码机构1套
8、激光刻印机1台
9、临时存样台3台
10、供料车2个
11、收料车2个(合格品1个、不合格品1个)
12、大功率静音气泵1个
13、试验防护罩
14、防护围栏
15、录像系统
1个供料车人工堆放试样,供料车存放18组试样
2、供料车可以给三台压力试验机供应试样,此时机器人分三排抓取试样
3、供料车推放到相应位置后,系统夹取试样到已启用压机进行测试(在控制软件上人工设定供料车的试样数量并启用)
4、每台压机的投入使用的前提是:供料车上有试样、供料车推入到位、供料车的试样数量已在控制软件设定
5、任一压机有影响正常使用的故障时,系统只给出报警提示信号,停止有故障压机的工作,但不影响其它压机的正常使用
1) 人工将待检测的试样放到供料车上;
2) 供料车推放到相应位置后,到智能检测系统控制柜处点击启动按钮(如开机,系统行自检,检查工作区域内是否有人等);
3) 机器人抓取试样送到定位扫码机构,完成扫码录入工作后,机器人再次抓取此试样送到相应的压机压盘处,试验防护罩下降进行防护;
4) 机器人取*二块试块重复上述操作,进*二台压机进行试验,*三块同理进*三台压机试验,以此类推后面试验;
5) 压机工作,完成试验后,试验防护罩升起,机器人取出该试块,将试块放到压机前面的临时存样台;
6) 待一台压机完成一组试验后,系统判定试块是否合格后由机器人从临时存样台依次取出试块,送到激光刻印机处打标记录“合格”或“不合格”;
7) 机器人将合格和不合格试块分别放到合格收料车和不合格收料车上。
系统有二次定位,吹除试样表面灰尘、重新夹取动作的整套机构,该机构的存在使每次送试样到压机的位置和时间基本相同;
2、防护系统完整,避免事故发生;
3、三台压机单工作互不影响,一台压机故障,另外两台压机可正常试验。
4、本系统具备同步录像功能,保存,自动匹配试件编号,可根据试件实验日期检索调取相应试验过程录像;每台压力试验机工位有视频摄像和机械臂工作区域,共四个摄像机位置,摄像头为无线网络传输,可在任意手机端进行远程。
